ZY-AI18 机电一体化综合实训考核设备
一、系统概述
灌装自动化生产线紧密结合《中国制造2025》和《国家中长期人才发展规划纲要》对“智能制造”和经济社会发展重点领域急需紧缺专门人才及创新型科技人才的培养要求,依据国家相关职业工种培养及鉴定标准,结合中国当前制造业的岗位需求,接轨世界技能竞赛(Worldskills)相关标准及规程开发设计而成。该套系统以“工作站”(Working Station)形式综合体现机电一体化自动生产、工业机器人自动化“工作单元”、及其他附属工作设施,操作者可以在学习中培养训练自动化专业技能、机器人自动化技能、世界级竞赛要求等,同时也可以提高职业素养中的社会能力与方法能力。
设备由灌装上料工作站、加盖拧盖工作站、检测分拣工作站、工业机器人包装工作站、成品自动入库工作站组成,包括了智能装配生产系统、自动包装系统、自动化立体仓库及智能入库系统、自动检测机质量控制系统、生产过程数据采集及控制系统等,是一个完整的智能工厂模拟装置,应用了工业机器人技术、PLC控制技术、步进控制技术、伺服控制技术、工业传感器技术、电机驱动技术等工业自动化相关技术,可实现空瓶自动上料、颗粒物料多样上料、物料自动分拣、颗粒可选填装、自动加盖、自动拧盖、成品检测、成品分拣、机器人抓取入盒、盒盖包装、自动入库等智能生产全过程。
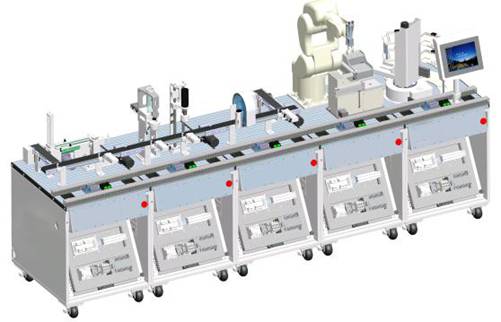
(设备参考图片)
二、技术参数
系统电源: 220V
设备重量:360kg
额定电压:AC220V ±5%
额定功率:3.6KW
环境湿度:≤90%?
设备尺寸:420cm×72cm×150cm(长×宽×高)
安全保护功能:急停按钮,漏电保护,过流保护。
PLC:西门子S7-1200
伺服:西门子V90/电机SIMOTICS S-1FL6
触摸屏:MT8101IE+MT-FX3M
步进电机:驱动器SR2/电机AM17HD6426-06N
机器人:川崎RS05N(或其它品种)
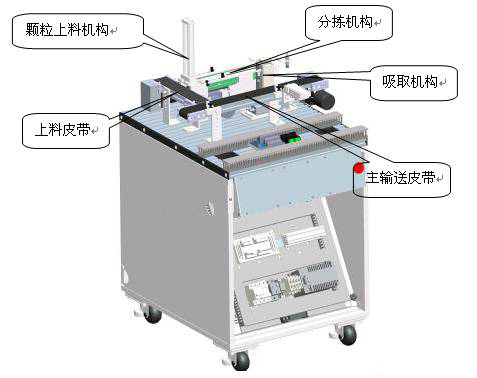
三、上料工作站
3.1工作站介绍
上料皮带逐个将空瓶输送到主输送皮带;同时颗粒上料机构将料筒内的物料推出;颗粒分拣机构对颗粒物料根据颜色进行分拣;当空瓶到达填装位后,皮带停止,定位夹紧机构将空瓶固定;吸取机构将分拣到位的颗粒物料吸取放到空瓶内;瓶子内物料到达设定的颗粒数量后,定位夹紧机构松开,皮带启动,将瓶子输送到下一个工位。此单元可以设定多样化的填装方式,可从物料颜色(2种)、颗粒数量(最多4粒)进行不同的组合,产生8种填装方式。
3.2主要技术参数
●CPU(1214C DCDCDC):品牌西门子,14 点集成 24 V 直流数字量输入,10 点集成数字量输出,2 点集成模拟量输入,0 至 10 V,2 点脉冲输出 (PTO),频率高达 100 kHz,脉冲宽度调制输出 (PWM),频率高达 100 kHz,集成以太网接口(TCP/IP native、ISO-on-TCP),所有模块上均为可拆卸的端子。
●直流减速电机(Z2D1024GN-18S-2GN75K):24VDC;减速比1/75;1800Rpm;0.45Kg.cm;0.69A;GN齿轮轴型。
●旋转气缸(HRQ10):品牌亚德客,双活塞齿轮齿条式复动型;缸径10;回转角度范围0-190°;重复精度0.2°;力矩1.1Nm;接管口径M4*0.8;油压缓冲。
●光纤放大器(FS-N11P):品牌基恩士,PNP输出;VR调节(粗/微调);响应时间1ms以下;12-24VDC供电;红色LED光源;各类线缆长度2m;尺寸15*39*73mm。
●光纤头(FU-25):品牌基恩士,扩散反射型,螺纹形,M6,端视图0.005 560 100,标准型2 m 自由裁切,适用于定位 M8 (约 18 g)
●光纤头(FU-35FZ):品牌基恩士,扩散反射型,螺纹形,M3,端视图附有镜头0.005 200 32不断裂强韧挠性1 m,自由裁切M3, 若搭配 F-2HA使用光点直径 0.4(约 6 g)
●开关电源(EDR-150-24V):单组输出24VDC;额定150W/6.2A。
●断路器(EA9AN2C10A):2极;额定10A;C型脱扣特性。
●感应开关:两线式;有接点磁簧管型;常开型;线长2m;5-30VDC供电;红色LED指示;适用范围G型(用于MD、MK、TR、TC、ACP、ACQ、STM、TWH(M)、TWQ、SDA气缸)
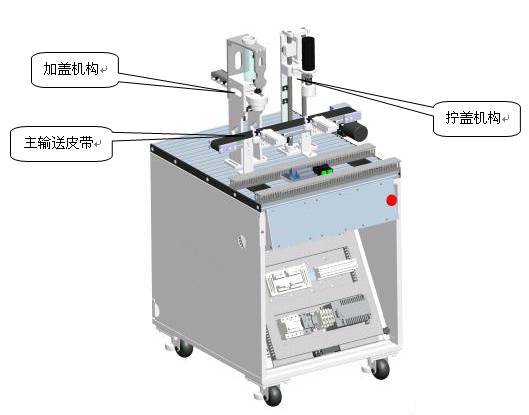
四、加盖拧盖工作站
4.1工作站介绍
接收上一工作站填装好颗粒的瓶子,当瓶子被输送到加盖机构后,主输送皮带停止,夹盖定位夹紧机构将瓶子固定,加盖机构启动加盖流程,将盖子加到瓶子上;加好盖子后主输送皮带启动,加上盖子的瓶子继续被送往拧盖机构,到拧盖机构下方,主输送皮带停止,拧盖定位夹紧机构将瓶子固定,拧盖机构启动,将瓶盖拧紧,主输送皮带启动,将拧好盖子的物料瓶输送到下一工位。瓶盖分为白色和黑色两种。
4.2主要技术参数
●CPU(1214C DCDCDC):品牌西门子,14 点集成 24 V 直流数字量输入,10 点集成数字量输出,2 点集成模拟量输入,0 至 10 V,2 点脉冲输出 (PTO),频率高达 100 kHz,脉冲宽度调制输出 (PWM),频率高达 100 kHz,集成以太网接口(TCP/IP native、ISO-on-TCP),所有模块上均为可拆卸的端子。
●CPU扩展(SM1221):品牌西门子,16×24VDC 输入 电流吸收/电流源。
●CPU扩展(SM1222):品牌西门子,8×24VDC 输出 电流源。
●直流减速电机(Z2D1024GN-18S-2GN75K):24VDC;减速比1/75;1800Rpm;0.45Kg.cm;0.69A;GN齿轮轴型。
●拧盖电机(ZGX45RGG DC24V ):24VDC;减速比1/22.5;直径45;额定转速:2.4、(rpm)r/min;0.47A;永磁直流行星齿轮减速电机。
●笔型气缸(PB-10X80-S-U):品牌亚德客,复动型;缸径Ф10;行程80mm;附磁石;径向进气型;轴向固定架;内螺纹M5*0.8;防撞垫缓冲。
●光纤放大器(FS-N11P):品牌基恩士,PNP输出;VR调节(粗/微调);响应时间1ms以下;12-24VDC供电;红色LED光源;各类线缆长度2m;尺寸15*39*73mm。
●光纤头(FU-35FZ):品牌基恩士,扩散反射型,螺纹形,M3,端视图附有镜头0.005 200 32不断裂强韧挠性1 m,自由裁切M3, 若搭配 F-2HA使用光点直径 0.4(约 6 g)
●开关电源(EDR-150-24V):单组输出24VDC;额定150W/6.2A。
●断路器(EA9AN2C10A):2极;额定10A;C型脱扣特性。
●感应开关:两线式;有接点磁簧管型;常开型;线长2m;5-30VDC供电;红色LED指示;适用范围G型(用于MD、MK、TR、TC、ACP、ACQ、STM、TWH(M)、TWQ、SDA气缸)
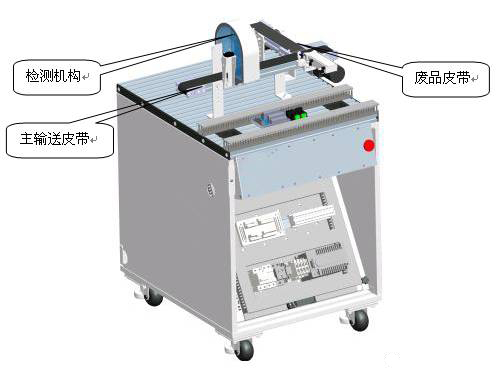
五、检测分拣工作站
5.1 工作站介绍
主皮带运行,接收上一站拧好盖后的物料瓶子,当物料瓶经过检测机构时:回归反射传感器检测瓶盖是否拧紧;检测机构检测瓶子内部颗粒是否符合要求;对拧盖与颗粒均合格的瓶子进行瓶盖颜色判别区分;拧盖或颗粒不合格的瓶子被分拣机构推送到废品皮带上(短皮带);拧盖与颗粒均合格的瓶子被输送到皮带末端,等待机器人搬运。
5.2主要技术参数
●双轴气缸(TR-16X125-S):复动型;缸径Ф12;行程125mm;附磁石;铜套轴承;内螺纹M5*0.8;防撞垫缓冲。
●调压过滤器:介质空气;内螺纹PT1/4;差压排水式;Mpa刻度;滤水杯容量15CC
●气体电磁阀:五口二位;先导式;双位置双电控;内螺纹M5;工作电压24VDC;DIN插座式;铝合金;压力范围0.15-0.8Mpa;介质空气。
●CPU(1214C DCDCDC):品牌西门子,14 点集成 24 V 直流数字量输入,10 点集成数字量输出,2 点集成模拟量输入,0 至 10 V,2 点脉冲输出 (PTO),频率高达 100 kHz,脉冲宽度调制输出 (PWM),频率高达 100 kHz,集成以太网接口(TCP/IP native、ISO-on-TCP),所有模块上均为可拆卸的端子。
●CPU扩展(SM1221):品牌西门子,16×24VDC 输入 电流吸收/电流源。
●CPU扩展(SM1222):品牌西门子,8×24VDC 输出 电流源。
●直流减速电机(Z2D1024GN-18S-2GN75K):24VDC;减速比1/75;1800Rpm;0.45Kg.cm;0.69A;GN齿轮轴型。
●光纤放大器(FS-N11P):品牌基恩士,PNP输出;VR调节(粗/微调);响应时间1ms以下;12-24VDC供电;红色LED光源;各类线缆长度2m;尺寸15*39*73mm。
●光纤头(FU-35FZ):品牌基恩士,扩散反射型,螺纹形,M3,端视图附有镜头0.005 200 32不断裂强韧挠性1 m,自由裁切M3, 若搭配 F-2HA使用光点直径 0.4(约 6 g)
●光纤头(FU-25):品牌基恩士,扩散反射型,螺纹形,M6,端视图0.005 560 100,标准型2 m 自由裁切,适用于定位 M8 (约 18 g)
●开关电源(EDR-150-24V):单组输出24VDC;额定150W/6.2A。
●断路器(EA9AN2C10A):2极;额定10A;C型脱扣特性。
●感应开关:两线式;有接点磁簧管型;常开型;线长2m;5-30VDC供电;红色LED指示;适用范围G型(用于MD、MK、TR、TC、ACP、ACQ、STM、TWH(M)、TWQ、SDA气缸)
六、工业机器人包装工作站
6.1工作站介绍
AB两个升降台分别存储包装盒底和包装盒盖;工业机器人包装工作站启动后,A升降台将包装盒底推向物料台上,A升降台随之上升一个盒底位;等待上一站检测合格的物料瓶到位,当上一站合格物料瓶到位,启动工业机器人将瓶子抓取,并放入物料台上的包装盒底内;当包装盒底4个工位放满瓶子,工业机器人自动从B升降台上吸取盒盖,盖在包装盒上,B升降台随之上升一个盒盖位,并通知成品自动入库工作站入库。

6.2主要技术参数
●机器人(RS05N):川崎品牌(也可选用ABB、三菱等品牌机器人),水平伸展距离 903mm,最大负载 5kg,本体重量 37kg,自重负载比 4.8,连接控制柜电缆长度 5m,自由度 6自由度,重复定位精度 ±0.03mm,工作范围最大速度:J1≧±180o(300o/s) J2≧+135o~-80o(300o/s) J3≧+118o~-172o(300o/s) J4≧±360o(460o/s) J5≧±145o(460o/s) J6≧±360o(740o/s) ,手腕最大力矩 惯性力矩:J4≧12.3N/m (0.4kg/m2) J5≧12.3N/m (0.4kg/m2) J6≧7.0N/m (0.12kg/m2)
●机器人控制器:川崎品牌(也可选用ABB、三菱等品牌机器人),尺寸(长宽高) 500 x420 x 259mm,重量 30kg,外部接口:USB、以太网(100BASE-TX)、RS232C,供电电源 200~240VAC,50~60Hz,输入/输出板卡 输入信号:≧32点;输出信号:≧32点(含接线端子台),主/从模式切换,支持多台机器人联动,结构 独立全封闭间接冷却方式,驱动方式 全数字伺服系统,储存容量 ≧8MB ,可控轴数 7,外部操作信号 紧急停止,外部保持等。
●示教器: 川崎品牌(也可选用ABB、三菱等品牌机器人),带有可触面板的TFT彩色液晶显示,紧急停止开关 示教锁定开关 安全开关等。
●步进电机驱动器:输入电压12-48VDC;输入信号电压4-28VDC;输入电流0.3-2.2A;步进脉冲频率2-2MHz;3位拨码开关;8种电流细分选择
●CPU(1214C DCDCDC):品牌西门子,14 点集成 24 V 直流数字量输入,10 点集成数字量输出,2 点集成模拟量输入,0 至 10 V,2 点脉冲输出 (PTO),频率高达 100 kHz,脉冲宽度调制输出 (PWM),频率高达 100 kHz,集成以太网接口(TCP/IP native、ISO-on-TCP),所有模块上均为可拆卸的端子。
●CPU扩展(SM1221):品牌西门子,16×24VDC 输入 电流吸收/电流源。
●CPU扩展(SM1222):品牌西门子,8×24VDC 输出 电流源。
●开关电源(EDR-150-24V):单组输出24VDC;额定150W/6.2A。
●断路器(EA9AN2C10A):2极;额定10A;C型脱扣特性。
●感应开关:两线式;有接点磁簧管型;常开型;线长2m;5-30VDC供电;红色LED指示;适用范围G型(用于MD、MK、TR、TC、ACP、ACQ、STM、TWH(M)、TWQ、SDA气缸)
●调压过滤器:介质空气;内螺纹PT1/4;差压排水式;Mpa刻度;滤水杯容量15CC
●气体电磁阀:五口二位;先导式;双位置双电控;内螺纹M5;工作电压24VDC;DIN插座式;铝合金;压力范围0.15-0.8Mpa;介质空气。
七、成品自动入库工作站
7.1工作站介绍
由一个弧形立体仓库和2轴伺服堆垛机构组成,当工业机器人工作站完成包装任务,接收信号把机器人工作站物料台上的包装盒体吸取出来,然后按要求依次放入仓储相应仓位。2×3的仓库每个仓位均安装一个检测传感器,堆垛机构水平轴为精密分度盘机构,垂直机构为涡轮丝杆升降机构,均由西门子V90精密伺服电机进行高精度控制。

7.2主要技术参数
●V90伺服控制:品牌西门子,集成全部控制模式:外部脉冲位置控制 内部设定值位置控制 速度控制 扭矩控制,集成抱闸继电器,1MHz高速脉冲输入,20位分辨率绝对值编码器,可通过SD卡参数复制等。
●V90伺服电机:品牌西门子,额定速度2000rpm,额定扭矩1.27NM,绝对编码器20位分辨,保护等级IP65 自冷却。
●真空发生器:直接配管型(无消声器);喷嘴直径Ф0.5;最高真空度+88kPa;SUP接口Rc1/8;VAC接口Rc1/8;EXH接口Rc1/8
●吸盘:垂直真空口接管;不带缓冲;Ф10平行吸盘;丁晴橡胶;接管方式外螺纹;螺纹直径M5*0.8
●CPU(1214C DCDCDC):品牌西门子,14 点集成 24 V 直流数字量输入,10 点集成数字量输出,2 点集成模拟量输入,0 至 10 V,2 点脉冲输出 (PTO),频率高达 100 kHz,脉冲宽度调制输出 (PWM),频率高达 100 kHz,集成以太网接口(TCP/IP native、ISO-on-TCP),所有模块上均为可拆卸的端子。
●CPU扩展(SM1221):品牌西门子,16×24VDC 输入 电流吸收/电流源。
●CPU扩展(SM1222):品牌西门子,8×24VDC 输出 电流源。
●开关电源(EDR-150-24V):单组输出24VDC;额定150W/6.2A。
●断路器(EA9AN2C10A):2极;额定10A;C型脱扣特性。
●感应开关:两线式;有接点磁簧管型;常开型;线长2m;5-30VDC供电;红色LED指示;适用范围G型(用于MD、MK、TR、TC、ACP、ACQ、STM、TWH(M)、TWQ、SDA气缸)
●调压过滤器:介质空气;内螺纹PT1/4;差压排水式;Mpa刻度;滤水杯容量15CC
●气体电磁阀:五口二位;先导式;双位置双电控;内螺纹M5;工作电压24VDC;DIN插座式;铝合金;压力范围0.15-0.8Mpa;介质空气。
八、人机界面
8.1人机界面介绍
7寸宽屏触摸被安装在成品入仓单元,与机电一体自动化生产组各站控制器PLC连接通讯,显示设备所需要的参数设置,设备启停,显示各站间的IO信号,硬件IP等。

九、附件
9.1附件介绍
●无油静音空气压缩机
●额定电压:220V AC 50Hz
●电流:2.4A
●功率:545W
●容积流量:70L/min
●启动压力:0.47Mpa
●额定排气压力:0.77Mpa
●储气罐容积:32L
●噪音:55-62dB?
●重量:29kg
十、实训项目
实训项目 |
实训内容 |
培养目标 |
| 机械装调实训项目 |
上料皮带装配训练?
循环选料机构装配训练?
加盖机构装配训练?
拧盖机构装配训练?
检测机构装配训练 |
对机械传动皮带单向运转,双向运转的结构认识安装及调试?
对气缸组合加盖拧盖机构的结构认识安装及调试?
对传感器组合检测机构的结构认识安装及调试 |
电气装调实训项目 |
上料皮带电气接线训练?
循环选料机构电气接线训练?
加盖机构电气接线训练?
拧盖机构电气接线训练?
检测机构电气接线训练 |
接线图纸的认识,可按图接线?
电气接线工具的认识,了解及使用?
传感器、气缸等电气件的接线方法?
各种电机的接线认识注意事项 |
PLC编程实训项目 |
灌装上料工作站的编程调试?
加盖拧盖工作站的编程调试?
检测分拣工作站的编程调试?
工业机器人包装工作站的编程调试?
成品自动入库工作站的编程调试?
灌装自动化生产线的编程调试 |
可使用博途软件的新建、编辑等基本操作?
可使用博途软件的设置、组态等通信操作?
熟悉传感器等输入在西门子PLC中的应用?
熟悉气缸等输出在西门子PLC中的应用?
能使用西门子PLC控制步进电机?
能使用西门子PLC控制伺服电机?
能使用西门子PLC控制机器人?
能使用西门子PLC与触摸屏的通信 |
机器人基本操作 |
正常安全开关机、手动操作?
一般故障排除?
正常生产操作(机器人联线开自动)?
生产过程中机器人非硬件损坏导致的报警停机后快速恢复生产?
手动调试机器人程序、修改程序中机器人点的位置?
备份恢复已编好的机器人程序 |
能进行机器人开关及手动操作及自动操作?
能排除一般性故障?
能进行机器人自动操作?
会手动调试机器人程序、修改程序?
会备份、恢复已编好的机器人程序?
懂得安全文明操作 |
机器人编程 |
正常安全开关机、手动?
一般故障排除?
正常生产操作(机器人联线开自动)?
生产过程中机器人非硬件损坏导致的报警停机后快速恢复生产?
创建、修改及调试机器人应用程序?
备份、还原机器人程序 |
进行机器人开关及手动操作?
能排除一般性故障?
能进行机器人自动操作?
熟练编写机器人程序,调试机器人?
会手动调试机器人程序、修改程序?
会备份、恢复已编好的机器人程序?
懂得安全文明操作 |
机器人电气维护 |
排除普通错误,恢复正常状态?
确定错误类型,故障诊断?
备份、还原机器人程序及机器人系统文件?
机器人系统功能设置、伺服参数设置、机器人 I/O 设置及应用?
安全操作 |
能够排除普通电气错误?
能够确定错误类型,并进行故障诊断?
会备份、还原机器人程序及机器人系统文件?
会熟练设置机器人系统功能、机器人 I/O 设置及应用?
懂得安全文明操作 |
机器人机械维护 |
正常安全开关机、手动?
机械本体故障诊断及排除?
正常生产操作(机器人联线开自动)?
更换机器人机械部件?
机器人调整?
机器人机械本体定期维护保养?
安全操作 |
能进行机器人开关及手动操作?
能诊断和排除机械本体故障?
能够更换机器人机械部件?
会调整机器人?
会对机器人机械本体定期进行维护和保养?
懂得安全文明操作 |
十一、详细配置清单
| 序号 |
名称 |
规格型号/技术参数 |
数量 |
品牌 |
备注 |
机电一体化综合实训考核设备标配清单 |
1 |
灌装上料工作站 |
由上料皮带、主皮带、分拣机构,吸取机构等组成 |
1套 |
中义 |
标配 |
2 |
加盖拧盖工作站 |
由加盖机构、拧盖机构等组成 |
1套 |
中义 |
标配 |
3 |
检测分拣工作站 |
由主皮带、检测机构、分拣机构等组成 |
1套 |
中义 |
标配 |
4 |
工业机器人包装工作站 |
由六轴工业机器人、物料台、盒底升降台、盒盖升降台等组成 |
1套 |
中义 |
标配 |
5 |
成品自动入库工作站 |
由堆垛机、6位环形立体仓库、吸取机构等组成 |
1套 |
中义 |
标配 |
6 |
人机界面 |
? |
1套 |
中义 |
标配 |
7 |
供气系统 |
? |
1套 |
中义 |
标配 |
8 |
电脑推车 |
尺寸约:580mm×580mm×1000mm ;工业铝型材结构,带背网 |
2张 |
中义 |
标配 |
9 |
装配桌 |
? |
2张 |
中义 |
标配 |
10 |
学生凳 |
不锈钢支架,液压升降,钢制凳托,ABS蓝色凳面 |
4张 |
中义 |
标配 |
11 |
总控电源 |
? |
1套 |
中义 |
标配 |
12 |
产品配件包 |
包含了PLC编程线、机器人USB下载线、触摸屏USB下载线、485通讯线、空气压缩机、排插座、物料块、设备使用说明书、安装螺丝螺母、工具等 |
1套 |
中义 |
标配 |
机电一体化综合实训考核设备选配清单 |
9 |
课桌椅 |
实训室配套电脑桌椅 |
若干 |
? |
选配 |

|
